新聞中心Press center
新聞中心Press center
 熱門產品Hot products
熱門產品Hot products
 解決方案Solution
解決方案Solution
 聯系方式Contact information
聯系方式Contact information
前不久,Uber在美國制造了全球首例無人駕駛車輛致行人死亡事故。雖然根據當地警察局透露,受害人是從暗處突然闖入機動車道,但事故還是不可避免地將自動駕駛推上了輿論的風口浪尖。一周前,Uber宣稱“在可預見的未來終止在加州的所有無人駕駛汽車測試活動。”

圖片來源網絡
“逝者已矣,生者如斯”。測試可以停止,技術發展則不能停滯不前,而且要有的放矢,事故一出,Uber所使用的傳感器技術一時成為了調研的“眾矢之的”。
Uber現有的自動駕駛傳感器技術
Uber 的自動駕駛車輛搭載了若干個成像系統,如圖所示:
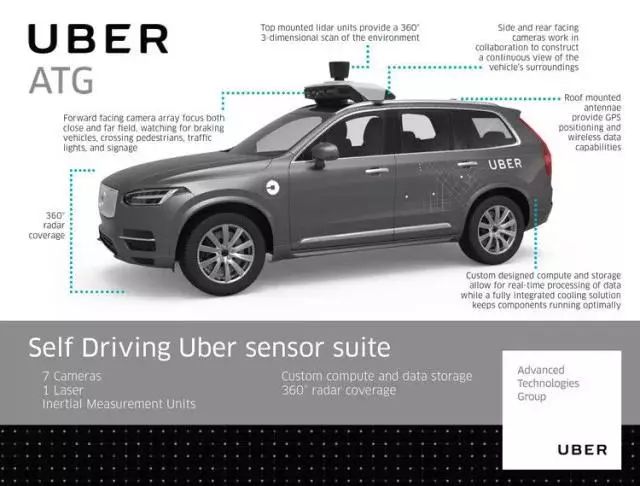
1. 激光雷達
Uber 改裝的沃爾沃XC90頂部搭載了1臺Velodyne的HDL-64激光雷達,通過三維激光掃描技術,能對周圍靜止和移動物體生成3D圖像,并且激光探測不受光照條件影響,探測精度可達厘米級。據Velodyne 官網顯示,HDL-64探測距離為120米,理論上可以避免事故的發生。

在這個場景下,激光雷達是能夠探測到的,但它也存在固有的缺陷,比如對黑色物體不敏感。Uber事件中,由于受害者身穿黑色上衣,反射率較低,致使激光雷達感知范圍大打折扣。其次,由于自行車架以管狀為主,大量的空洞使激光雷達的掃射面積大幅減少,可獲取的點云數據十分有限,有可能導致激光雷達無法在第一時間對目標進行識別,也更無法完成測距和緊急制動等動作。因此,激光雷達不是萬能的。
2. 可見光攝像頭
Uber在XC90上安裝了短焦和長焦光學相機共7臺,分別從前向、側向和后向對成像進行實時分析。可見光攝像頭,在光照較差的情況下,攝像頭的目標識別能力將會下降。Uber事故發生的當晚,車輛所行駛的道路有一部分被陰影所覆蓋。受害者橫穿道路時恰好在陰影區域內,攝像頭沒有及時發現目標。
對于單目攝像頭來說,要想獲得距離信息,必須先識別目標。首先要對目標進行框圖分類,而分類和識別是一體的,不識別無法準確分類。圖像的分類以特征提取為基礎,這就需要建立并不斷維護一個龐大的樣本特征數據庫,如果數據庫中缺乏待識別目標的特征數據,就無法對這些車型、物體、障礙物進行識別,從而導致系統漏報。
圖像分類是由一些圖像處理技術綜合而成的。在分類圖片時,首先判斷圖像是否需要進行預處理,如去除噪聲等。然后提取圖像的特征并存儲在特征庫中,利用圖像特征訓練分類器,輸出分類結果。這個過程對于前方突然掉落的物體、突然出現的行人是不適用的。
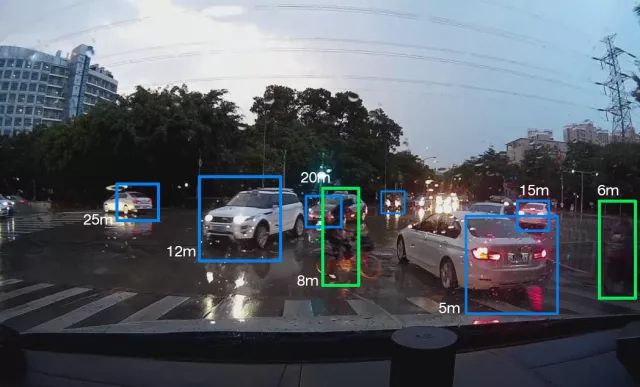
分類識別后是估算距離,單目估算距離主要是根據目標在圖像中的像素大小,這種方法準確度不高。

如上圖所示,由于距離因素,行人3和行人2的像素大小是非常接近的,但行人2和行人3與車輛距離差別很大,在單目看來,距離卻是完全一樣的。
與單目攝像頭相比,雙目在準確度上要高得多。
雙目與單目區別有幾點,首先,雙目是測量距離而非估算。雙目攝像頭的成像原理與人眼相似,通過三角測距算法獲得視域內任意目標的距離數據。
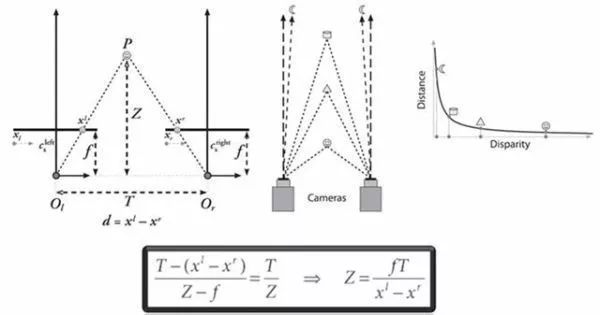
雙目與單目的第二點區別是雙目可以在不識別目標的情況獲得深度(距離)數據。雙目立體視覺系統就是通過對兩幅圖像視差的計算,直接對前方景物進行距離測量(視場范圍內),而無需判斷前方出現的是什么類型的障礙物。
對比來看,單目攝像頭成本低,系統結構簡單。其缺點在于必須不斷更新和維護樣本數據庫,才能保證系統達到較高的識別率。而雙目視覺系統價格雖比單目高,但與激光雷達方案相比,具備一定價格優勢;二是不受識別率限制,無需先進行識別再進行測算,而是對視域范圍內的障礙物實時進行測量;三是測距精度比單目高,直接利用視差計算距離;四是無需維護樣本數據庫,節省處理器帶寬。
雙目立體視覺系統在距離測算上相比單目攝像頭具有獨特的優勢,但受成像器件的限制,現有的可見光波段雙目立體視覺系統只能應用在光照適當的條件下,對于夜間,尤其在惡劣的氣候條件下就不再起作用。此時,我們可用紅外熱成像技術來提高系統的識別能力。
紅外熱成像技術
紅外熱成像技術是一種被動紅外夜視技術,是利用自然界物體紅外熱輻射強度的不同來形成圖像,并且不受光照、霾、雪、霧等客觀條件影響。

圖為紅外熱像儀偽彩效果圖

圖為紅外熱像儀灰度成像圖
紅外熱成像技術與立體視覺技術的融合,將立體視覺的應用范圍推廣到了紅外波段,形成了技術上的強大合力。
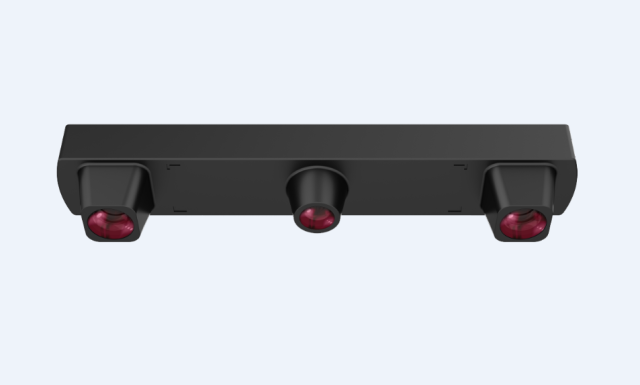
紅外雙目立體視覺系統
紅外雙目立體視覺系統是雙目立體視覺技術與紅外熱成像技術一體化融合的產物。雙目模組能夠實時對視域范圍內所有物體進行測距和識別,從而優化了可見光攝像頭需要先識別后測距的數據反饋機理,縮短了無人駕駛系統從發現目標到緊急制動的時間。
而集成于雙目模組上的兩個紅外熱像儀,能夠對目標物體散發的紅外輻射能量進行捕捉,再通過光電轉化形成熱圖,繼而從根本上規避激光雷達對反射率低的目標無法進行有效描述的短板,并且對諸如自行車、欄桿等幾何結構上存在大量空洞的目標能夠進行實時成像;同時,熱像儀不依賴光源成像的特質,使其能夠勝任全天時作業任務。
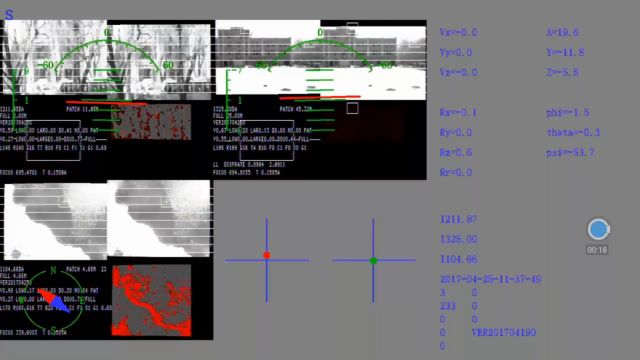
上博智像紅外雙目立體視覺環境感知系統正是源自這樣的設計理念應運而生的。該系統基于FPGA+ARM架構將兩個熱像儀所成熱圖像進行畸變校正、視差矯正、立體信息解算等分析,最終得到視域范圍內障礙物的距離信息,并以點云的形式將數據發送給控制終端,以此來增強無人系統對環境的感知能力,實現全天時條件下視覺測距、障礙物檢測、避障方向優選等功能。
該系統有效彌補可見光攝像頭和激光雷達的不足,使現有的自動駕駛技術如虎添翼,更好地為行人、車輛和駕駛員保駕護航。
最新產品
New products
了解更多>